Finally designed a fully 3d printed quadcopter frame. I am using FreeCAD 1.0 on Ubuntu for designing this frame. After a few alterations and numerous wasted PLA print materials, the quadcopter frame is ready.
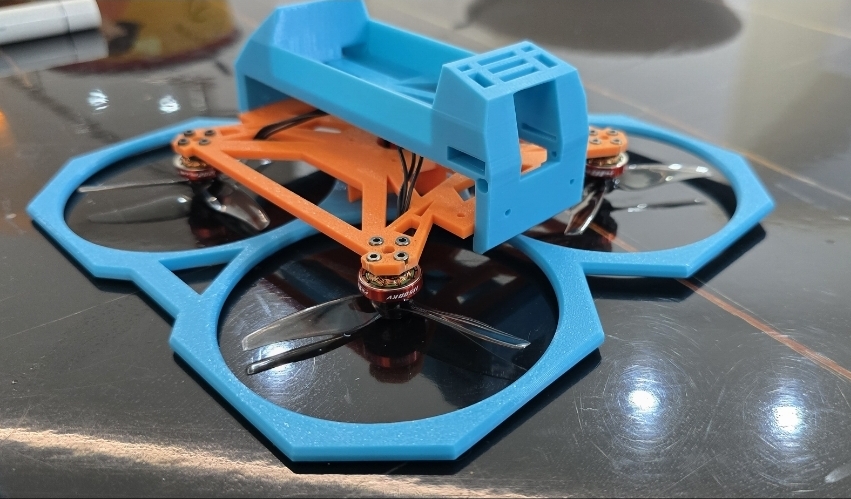
It will running on Pico Pi 2 and fully modularized components for newbies. The best part is that I am going to run RubyFPV on it with CM0 …. stay tuned….