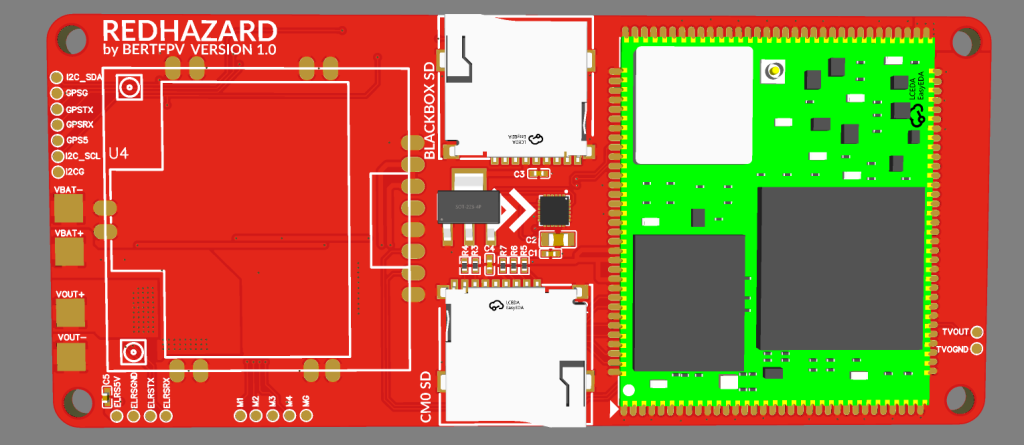
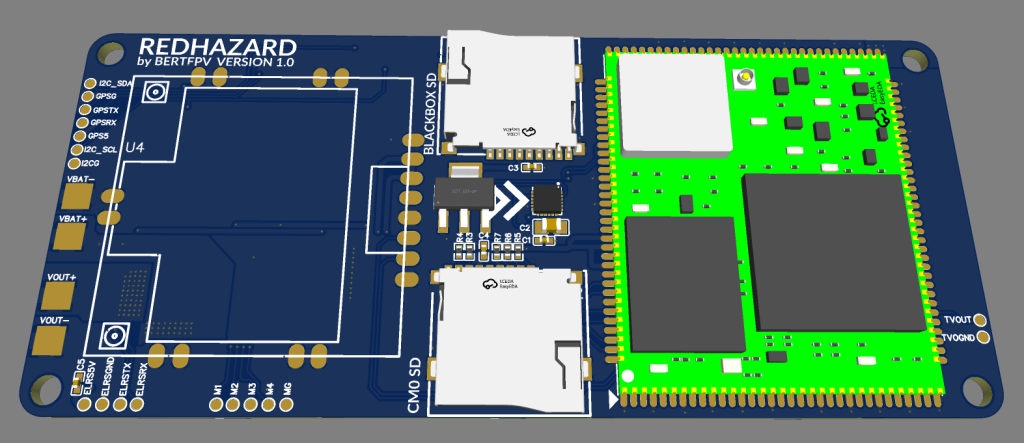
So this one a little bit different. I am using all modules expect the gyro and some 3.3V regulator for the sdcard (It may having lots of IO and separated it from the Pico Pi2)
What is this actually? It is a flight controller with:
– Pico Pi 2 as the flight controller. It will be compatible with betaflight.
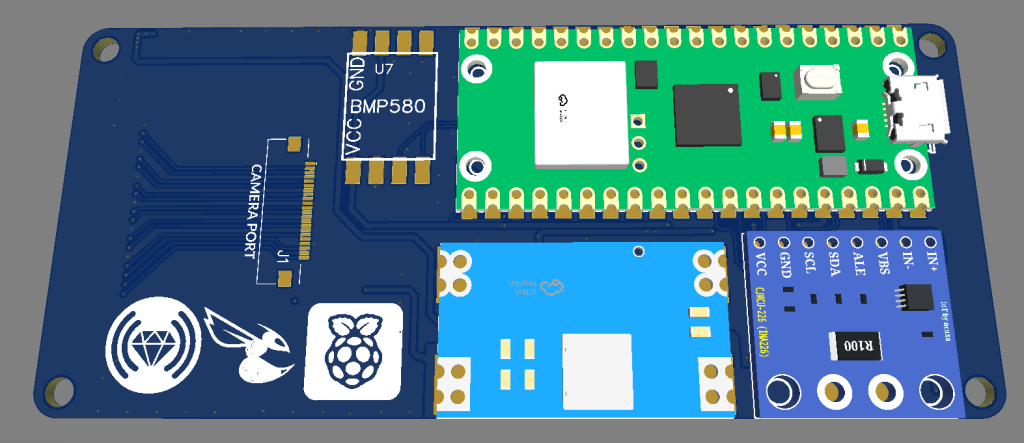
– BMP580 via I2C
– ICM-40609-D via SPI with interrupt pin. This will make it even smoother and less load on CPU
– INA229 measuring voltage and current
– BL-M8812EU2 for RubyFPV
– Compute Module Zero: It provides the core processing capability of Raspberry Pi Zero 2 W in a compact, embeddable form factor, with on-board RAM and optional Wi-Fi® connectivity. Featuring 4-lane CSI and DSI for image and video capture and display applications, Compute Module Zero. I had enabled TVOUT for connecting to analog video display as debugging or development purposes. This will be using sdcard as I am using the LITE version and will be installing RubyFPV system that broadcast digital video feed.
– ov5647 camera module CSI port.
– 2S to 3S. Will upgrade in future version.
– Blackbox Enabled
– 2 x UART (one for ELRS another for GPS)
– 1 x Software UART as Telemetry (MAVLINK) to RubyFPV
– 4 x DSHOT150, DSHOT300
– 1 x I2C output for Magnetometer and other accessories
– 1 pair output power to the 4in1 ESC board.
The design already sent for fabrication and pending all the modules to be shipped. Once done will start to solder all the components and lets make it real.